Double Two-State Transformation
Match State / digital validation
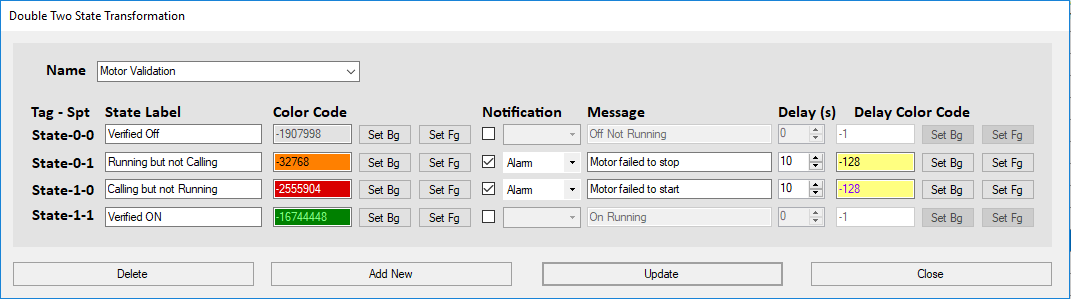
The double two-state transformation is similar to the two-state transformation but processes two Boolean inputs instead of just one. This transformation is commonly used to validate a commands successful execution by comparing a command signal (DO) to a feedback signal (DI). State 0-0 represents that both Boolean variables are False or "0". State 0-1 represents that the first variables is False or "0" and the second variables is True or "1". And so on.
The states follow the format of "Input variable - Setpoint variable". The first variable of the expression is always associated with the tag's Input Value and the second variable is always associated with the tag's Setpoint.
Example: Validate a motor status by comparing the call signal (DO) to the feedback signal (DI)
1> Create a tag that references the motors feedback status signal (DI).
2> Create a second tag that references the motors call signal (DO).
3> In the editor for the motor call tag, double click the Setpoint box and reference it to the motor's feedback signal
4> Create a “Double Two-State transformation” and enter the data as shown above
5> Add this new transformation to the tag for the motor's call signal (DO)